讓機器人在虛擬世界練功 清華創新 AI 技術奪冠
讓機器人在虛擬世界練功清華創新AI技術奪冠
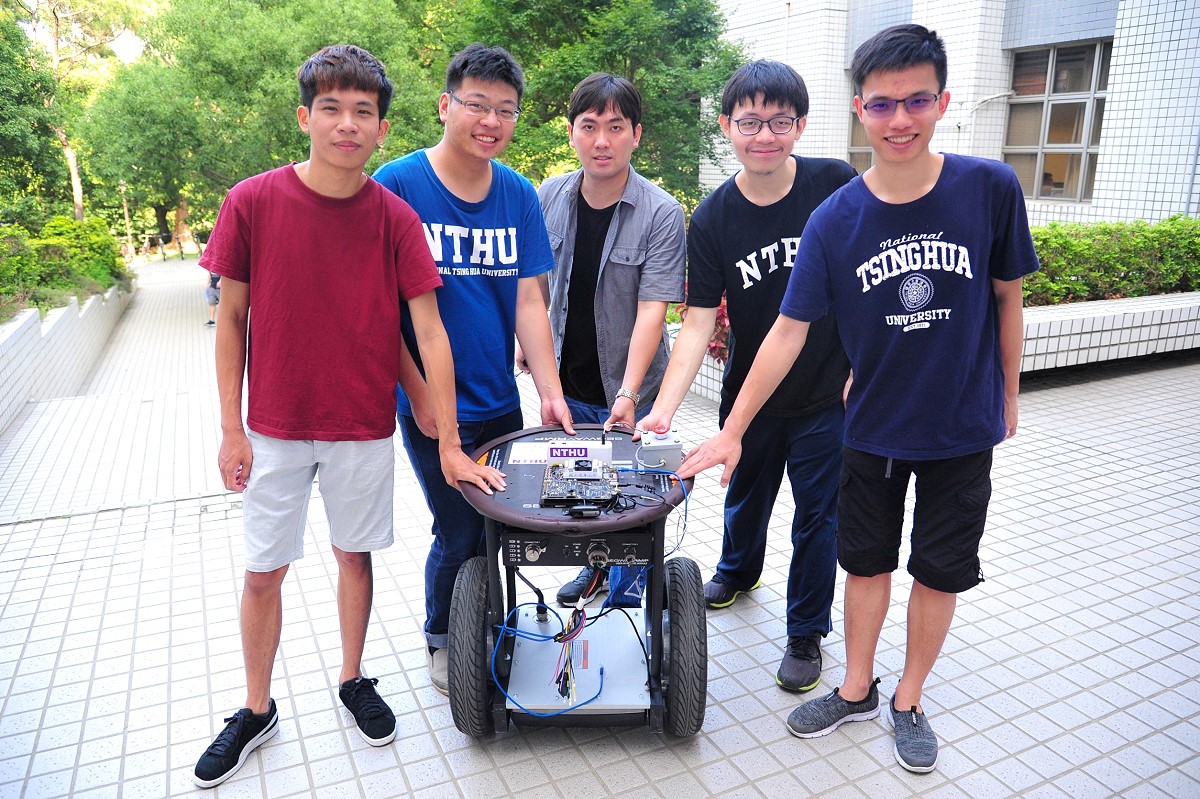
清華資工系李濬屹助理教授帶領學生團隊打造出新一代的「NVISION II 智慧自主機器人」,不同於傳統機器人全身裝滿感測器來偵測周遭環境,它只靠一個幾百元鏡頭來「看」世界,再透過深度神經網路分析,把真實世界的人、車、建築物等轉換為機器人能理解的圖像語義分割影像,就能讓機器人行動自如,不但能閃避障礙物及迎面而來的車輛,還會跟著人走。
且因這套系統可把機器人在真實世界中拍到的影像,利用深度學習技術自動塗色,標記出看到的物體,可讓機器人在虛擬世界中學習過去在真實世界才能學到的經驗,將可大量節省訓練機器人的時間及成本,並避免訓練過程可能造成周遭人事物的損壞。
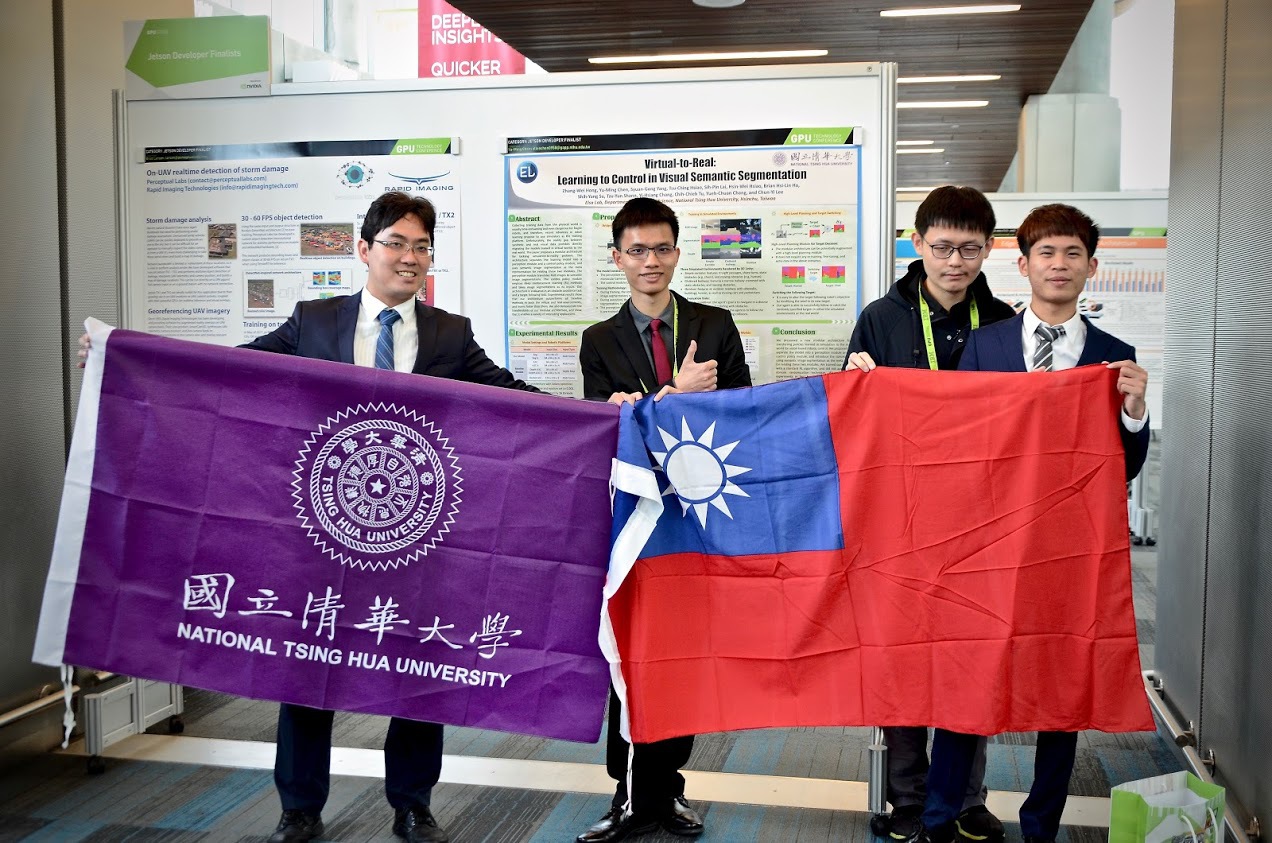
李濬屹老師團隊這項將深度學習應用在智慧型機器人上的研究成果,最近打敗全球許多大學、研究機構及機器人公司,奪下輝達(NVIDIA)在美國舉辦的全球首屆Jetson開發者挑戰賽冠軍。團隊還應全球最頂尖的人工智慧國際研討會之一的IJCAI之邀,將於7月赴瑞典發表研發成果。
拋開感測器改用數百元鏡頭
李濬屹老師前年在電梯中看到一張機器人競賽的海報,引起他的興趣,帶著學生一頭栽進了AI人工智慧與自主機器人的研究領域,「當時我只是想,很多機器人全身裝滿感測器,價格非常高昂;掃地機器人要撞到東西才轉彎,為什麼不能繞過去呢?」就是這樣的想法,激發李濬屹老師別開蹊徑,拋開昂貴的感測器,改用幾百元的簡單鏡頭來建立機器人的感知系統。
但他首先碰到挑戰,就是如何讓機器人分辨走在路上遇到的是人、車、樹、還是房子? 李老師認為,如果無法把機器人帶進我們的世界,不如讓我們走進機器人的世界,把真實世界的影像轉化為如同它在虛擬世界看到的影像。
轉換真實影像為色塊機器人也能懂
因此,李濬屹老師先用視覺辨識技術框出真實世界影像中物體的輪廓,再分析光影、色澤、材質,分別予以定義轉換,此時人變成紅色的色塊,移動的車輛則變成藍色,就像在「魔鬼終結者」等科幻電影中人工智慧看到的世界一樣,機器人就能「看懂」。
此外,在虛擬世界訓練時,也要讓機器人認知自己的身材高矮胖瘦,否則若認知錯誤,在真實世界轉彎時就會撞到東西。
李濬屹老師說,以這種技術設計出的掃地機器人,就可以在撞到家具之前繞過去,機器車走在路上也可閃避靜態與動態的障礙物,還能跟著人走,未來可以應用在智慧家庭、智慧校園及智慧製造等領域。
李濬屹老師強調,有了這套系統,無人駕駛車就可以在虛擬世界中先訓練,最後才真的上路測試,可大幅提升效率、節省成本,也減少危險,「我們是世界上很早提出這樣創新想法的團隊,最近看到Uber與Intel也把類似的想法用在開發自動駕駛車輛上。」

帶學生勇闖世界大賽矽谷奪冠
2016年李濬屹老師即帶領學生參加輝達在台舉辦的嵌入式智能機器人挑戰賽,以新手打敗不少專業團隊,榮獲全國冠軍。李老師今年再度帶著清華資工系學生洪章瑋、陳昱名、楊炫恭、蕭興暐、蕭子謦、賴思頻組成團隊,打進今年3月在美國矽谷舉辦的Jetson開發者挑戰賽,在80國團隊中勇奪冠軍。
團隊名稱ELSA LAB引自動畫電影「冰雪奇緣」的Elsa,李濬屹老師笑稱,這是因為Elsa智慧又善良的特質與團隊精神相符。
團隊成員、資工系大四生楊炫恭說,一年來為了找出能連接機器人眼中虛擬影像與真實世界的方法,日思夜想,「最後是在夢中得到靈感。」
團隊成員、資工系大四生陳昱名說,研究最辛苦的就是要帶著重達80多公斤的機器人到戶外測試、蒐集數據,好不容易教機器人看懂真實世界影像時,又發生機器人一動、鏡頭就出現殘影等問題,「最難忘的是和與學長洪章瑋熬夜調整參數,機器人終於成功動起來的瞬間。」